学生姓名:李昊阳
班级班级:机械(茅班)2020-01班
指导教师:孟祥印
毕设题目:面向薄壁异形空间曲面几何尺寸检测的机器人激光扫描系统


一、概况(一)选题意义
1.背景与意义:
飞机上某型GX天线为曲面薄壁异形结构,通过安装孔安装于飞机蒙皮上,对外形尺寸精度要求很高。
目前的工艺流程存在以下几点问题:
(1)需要经过加工-检测-再加工-再检测等多次循环才能加工出符合要求的零件,整体效率低下。
(2)零件在工艺流程中需要不断的在加工工装与检测工装之间进行拆装操作,对于工装的重复定位精度有较大的考验,加工精度不可控。
(3)工艺流程的多次加工和检测环节有人工进行,过分依赖于工人的熟练程度和经验丰富度。
为了解决该工艺流程中的效率低下、精度不可控等问题,本课题旨在通过引入自动化系统检测天线外形尺寸偏差,优化原有工艺流程,以提高零件加工的整体效率、合格率以及加工精度。
2.系统总体设计:
自动化检测系统主要由如下几部分构成:
(1)检测工装
检测工装能够完全模拟天线的实际安装工况。它通过计算待加工天线与检测工装内部边缘的宽度来确定待加工天线的加工余量。
(2)加工工装
加工工装由支架、高精度旋转台、天线安装座和气滑环组成。其主要作用是在磨削加工过程中夹持天线,并可以满足外缘检测和磨削加工时的不同要求。
(3)AUBO-i16协作机器人
该机械臂的主要任务是带动扫描仪进行扫描。在加工前,它会对安装在检测工装上的天线进行扫描,以计算天线的加工余量。在磨削完成后,机械臂还会对加工工装上的天线进行扫描,判断其是否符合工艺流程要求。
(4)HyperScan三维激光扫描仪
扫描仪负责对两种状态的天线进行扫描,并判断天线的外缘尺寸。该型号激光扫描仪的最小精度为0.025毫米,符合天线的加工要求。
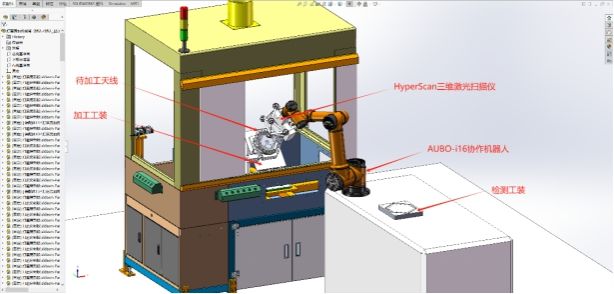
图1 自动化检测系统
3.自动化检测系统工作流程:

图2 自动化检测系统工作流程
(二)任务分解
1.总体目标与任务:
设计工件在测量和边缘打磨时的不同工装、简化扫描仪的扫描视点并规划高精度,高效率的扫描路线从而控制协作机械臂带动三维激光扫描仪对天线进行外缘尺寸偏差检测,要求外形边缘轮廓公差为-0.2mm ~0mm。同时可以配合打磨房实现在线检测偏差,建立通过扫描仪的间歇式扫描反馈磨削余量的自动化检测系统,主要任务如下:

图3 任务分解
二、已完成工作(一)工装设计
1.天线逆向工程
由于天线只有一个样品,所以需要对其进行逆向工程用来进行后续设计。
1) 利用HyperScan DX-B 三维激光扫描仪对天线进行扫描
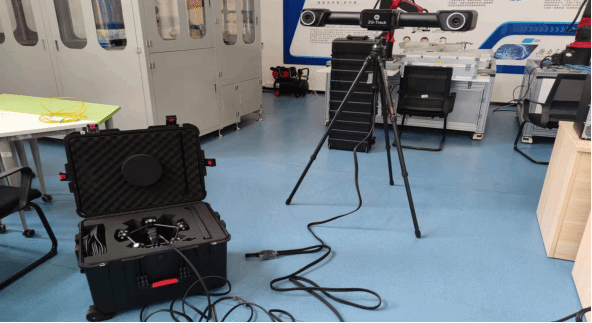
图4 HyperScan DX-B 三维激光扫描仪
2) 对得到的点云进行处理,得到天线的STL文件

图5 天线STL文件
3) 根据扫描得到的STL文件在Solidworks中利用mesh2surface插件进行逆向设计,最终的到天线的Solidworks模型。

图6 天线Solidworks图纸
2.检测工装设计
检测工装可以模拟天线实际安装的使用工况,标准天线安装在检测工装时其边缘会留有5mm的缝隙,检测时系统扫描并计算待加工天线与检测工装之间的缝隙,根据缝隙的宽度可以确定该天线在磨削时的加工余量。
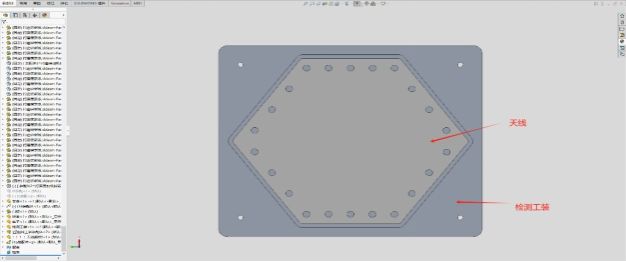
图7 检测工装
3.加工工装设计
整个加工工装由支架、高精度旋转台、天线安装座和气滑环组成,如图所示。支架通过螺丝固定在打磨房内部,而天线安装座则通过螺丝固定在支架上。天线则利用外部真空泵提供的负压吸附在天线安装座上。支架向上倾斜45度,这样设计既有利于扫描仪的扫描,也便于磨削机械臂的磨削加工。

图8 加工工装
(二)机械臂选型
1.扫描视点选择
在进行机械臂选型之前要先进行扫描视点的选择,本系统共选择了10个扫描视点,分别为首次检测时的4个和加工过程中的6个。其中检测时的4个视点可以扫描天线上表面和检测工装的上表面,能够完成对天线加工余量的计算;加工时的6个视点可以扫描天线的上表面以及六个侧面,能够完成对天线加工质量的判断。
2.机械臂选型
机械臂选择为AUBO-i16协作机器人,其末端负载、重复定位精度、工作空间、关节运动速度等参数均符合检测系统的要求。
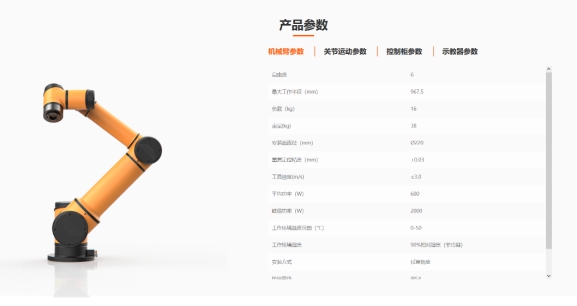
图9 AUBO-i16协作机器人技术参数
3.机械臂位姿确定
根据选择的扫描视点以及AUBO-i16协作机器人各关节参数确定10个扫描视点下机械臂的不同位姿。目前的10个位姿均满足扫描仪不与机械臂发生干涉,机械臂不与打磨房发生干涉,同时也能满足系统扫描时的需要
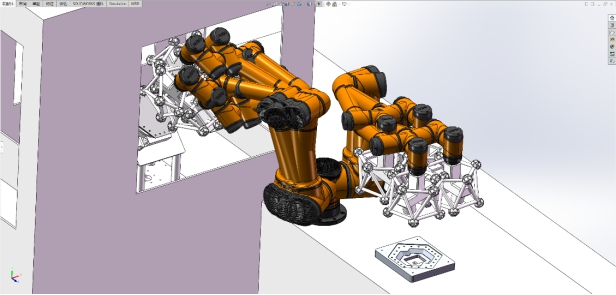
图10 机械臂位姿示意图
(三)仿真环境搭建
1.简化系统模型
为了降低后续仿真计算的复杂度,需要对系统模型进行优化。在保持打磨房碰撞边缘不变的前提下,我将打磨房从简化为一个零件,并将加工工装也合并为一个零件。同时,我将打磨房、检测工装、加工工装和机械臂底座这四个零件组合成一个新的子装配体,可以简化后续导出的文件。

图11 系统简化模型
2.机械臂URDF文件导出
URDF文件包含了机器人的几何形状、连接关系、传感器配置、关节信息等。通过使用URDF文件,可以在仿真软件中实现机器人的可视化、运动规划、碰撞检测等功能。
我按照标准DH参数对检测系统建立各关节原点、基准轴和坐标系,并利用solidworks软件中的SW2URDF插件设置各连杆包含的零件、连杆总质量、关节旋转轴、旋转正方向、旋转角度范围、最大旋转速度和最大力矩等参数。

图12 原点、基准轴和坐标系

图13 SW2URDF插件
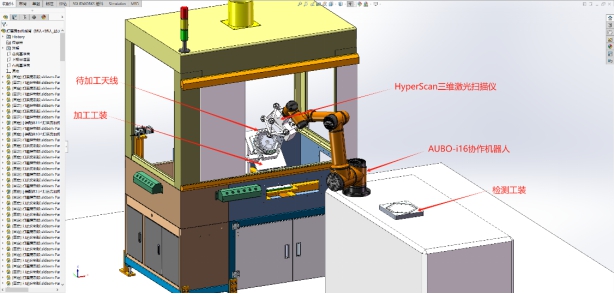
图14 生成的URDF文件
3.URDF2PROTO
在Python环境下,可以利用urdf2proto模块将URDF文件转换为Webots可以识别的Proto文件。URDF2PROTO是一个用于将URDF文件转换为Webots可识别的Proto文件的工具。URDF文件描述了机器人模型的几何形状、连接关系、传感器配置和关节信息等。Proto文件是Webots仿真软件使用的一种特定格式,用于定义仿真世界中的物体和机器人模型。
(1)准备URDF文件:首先,准备待转换的URDF文件,其中包含了机器人模型的描述信息。
(2)安装URDF2PROTO模块:在Python环境中使用pip命令安装URDF2PROTO模块,命令为:pip install urdf2proto。
(3)执行转换:编写Python脚本,在脚本中导入URDF2PROTO包,并调用相应的函数将URDF文件转换为Proto文件。可以在终端或命令提示符中执行Python脚本进行转换。
图15 生成Proto文件的命令
图16 生成的Proto文件
4. Webots仿真环境搭建
(1)新建仿真世界:在Webots软件中创建一个新的仿真世界,并设置仿真参数,如仿真时间步长、重力加速度和物理仿真引擎等,以确保仿真环境的准确性和稳定性。
(2)添加测试平台:在仿真世界中加入一个适用于测试的平台,并根据需要调整平台的大小和形状,以满足实验要求和测试需求。
(3)导入检测系统:将之前导出的Proto文件移动至Webots工程文件的protos文件夹下,在Webots软件中通过添加节点并选择对应的Proto文件,将检测系统成功导入到仿真世界中。
(4)调整空间位置:对导入的检测系统进行空间位置调整,确保其准确地放置在测试平台上,以便进行后续的仿真测试和实验。
通过这些步骤,可以有效地搭建出符合需求的Webots仿真环境,并将检测系统成功集成其中,为后续的仿真测试和实验提供了基础条件。
图17 仿真世界
5.机械臂控制
机械臂控制采用Python编程语言,结合Webots仿真环境中的Python控制器。在代码编写过程中,选择了Python 3.7版本,并利用Webots提供的controller模块以及其他必要的模块。
通过编写的控制代码,实现了以下功能:
(1)控制机械臂根据输入的6个电机角度和运动时间进行精确控制。
(2)在机械臂运动过程中,实时监测各个关节的角度、速度和力矩,并在控制台上进行打印输出,以便进行实时监控和调试。
(3)实现了碰撞检测功能,一旦检测到碰撞事件发生,立即停止所有电机的运动,并输出发生碰撞的关节信息,以确保系统安全运行。
图18 控制代码
图19 仿真运动
三、下一步工作计划1.利用MATLAB在三维空间内对十个扫描视点间的路径进行插值并拟合成一条连续的曲线。
2.对机械臂进行逆运动学分析,做到输入机械臂末端位姿计算出机械臂六个关节对应的角度。
3.在Webots软件的仿真空间中验证扫描路径和逆运动学求解器。
4.验证检测工装以及加工工装的可行性。
5.控制AUBO-i16协作机器人带动HyperScan三维激光扫描仪进行扫描。
6.利用Python节点进行自动化检测系统的集成。
7.论文的撰写以及准备结题答辩。

问题一:机械臂的平台是否已经落实到位了?
回答:是的,机械臂的平台已经落实了。现在已经完成了机械臂的招标采购,并计划在本周末将其运送至机械馆外实验室。
问题二:后续系统集成那一部分准备怎么完成
回答:我计划使用Python控制机械臂和扫描仪,同时选择Arduino来控制高精度旋转台和打磨房。为了实现上下位机的通信,我暂时选择了串口协议作为通信方式。
问题三:是否可以按时完成毕业设计内容
回答:目前来看,我的进度是比较合理的。后续工作主要包括机械臂逆运动学、路径插值、机械臂控制和系统集成等四个方面。目前已经完成了逆运动学和路径插值所需的知识学习,只需进行代码实现即可。而机械臂控制部分已在仿真环境中完成,系统集成的整体思路也已确定。总的来说是可以按时完成的。

在准备本次中期答辩的过程中,我对已完成的工作进行了详细整理,以便后续撰写论文时能够更顺利地展开。同时我也对接下来需要进行的工作内容和时间安排进行了更为详细的规划。
答辩是一个反思和总结的机会,通过整理已完成的工作并清晰地展示出来,我更深入地了解了自己的研究方向和所取得的进展。
在答辩中,通过与老师的讨论和互动,我收到了宝贵的指导和建议,有助于我更好地改进和完善我的研究方案。
老师在答辩中提出的问题和建议为我指明了进一步改进和深入研究的方向,有助于我更有针对性地进行后续工作。
我会根据导师的建议重点学习,并做好相应的准备,以更好地应对接下来的研究工作。

